Code File Location: VisualSim/actor/arch/Buses/AMBA_AHB
2. Description
7. AMBA_AHB_Specification_and_Comparison_to_Model
8. Model_Parameters, Data Structure Fields and Ports
o The Advanced High-speed Bus (AHB) library block conforms to the ARM Advanced Microcontroller Bus Architecture (AMBA) specification for read, write, Retry and Split operations.
o
The
Advanced Microcontroller Bus Architecture was introduced in 1996 and is
widely
used as the on-chip bus for ARM processors. The first generation of the
AMBA
buses was the Advanced System Bus (ASB) and Advanced Peripheral Bus
(APB).
The VisualSim AHB Bus emulates the AMBA 2.0 AHB Bus Protocol to match the functionality and timing.
The AHB bus model has the following features:
- single edge clock protocol
- split transactions
- multiple bus masters and slaves
- burst transfers
- Retry transaction
- Wait states
- Single outstanding transaction
- pipelined address phase operations
- single-cycle bus master handover
- large bus-widths (64/128 bit)
Devices
The block contains 4 default Master and 4 default slave ports.
Transaction
The most common transaction sent through the AHB Bus is the Processor_DS. The bus uses the following fields of the Processor_DS:
The fields of the Processor_DS data structure determines the type of Transaction – Read or a Write, transfer size in bytes, split, source and destination.
Masters
and Slaves
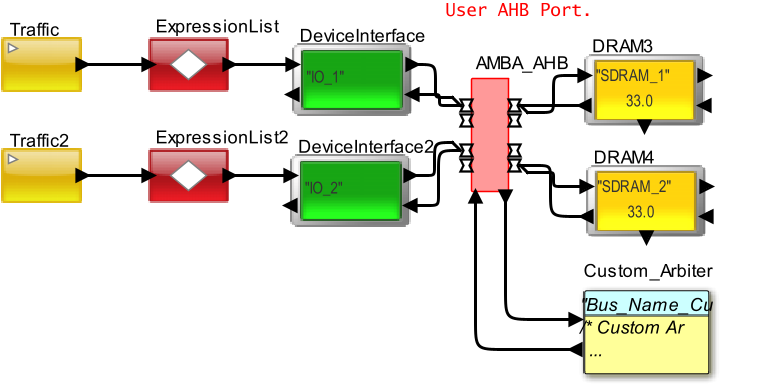
The Master can be a standard block such as a DMA, Processor, traffic generator or a custom block that uses the DeviceInterface block as the protocol interface between the Block and the Bus. Similarly, the slave can be a Cache and DRAM or any other custom block that is connected to the Bus using the DeviceInterface block as the protocol interface. For the Slave side, the direction of the ports of the DeviceInterface block must be changed using the Right-click->Appearance->Flip Ports Horizontally.
Every Master and Slave is associated with a FIFO Buffer. The size is determined by the FIFO_Buffer parameter. The FIFO buffer is store the requesting or responding transaction that are waiting for the arbiter to allocate the bus.
Operation
On receiving a Processor_DS from the Bus Master, the transaction is placed in the FIFO Buffer and a request is sent to the Bus Controller. When the bus is available, the BusArbiter selects the master to grant access to the bus.
The
bus arbiter has two standard policies
to select the next Master to transmit- First Come-First Serve (FCFS)
and Round
Robin. The FCFS orders the incoming request in the order of
arrival and
based on the priority. The transaction priority is the value
in the A_Priority
field. Higher the value means higher the
priority. The Round-Robin gives equal weightage
to
all Masters and selects a transaction from each Master in order.
The
order of the Masters to transmit is listed in the parameter- "Round
Robin
Port Array" and allows transfer through the bus to the respective
slave.
Only one Master can be active on the bus at any time. Until
the bus
completes the transaction ie
the request and data
transfer, no other Master can gain Bus access. The lone
exception is a
When the next Master is selected, the Bus generates a single cycle for the Address and Control phase. The single cycle does not output any data structure. It generates a delay internally and the timing diagram will display the address cycle. The Bus Controller manages all commands and transfer on the Bus. The Bus Controller handles the response from the slave (proceed, or Split Transaction) and processes till the transfer completes. Only one outstanding transaction can be active on the Bus. The only exception is when a split transaction occurs. For more details on the split transaction, review the section below on Split Transaction.
Adding
Wait Cycles
It is
possible to add Wait states at any
time and to any transaction. The User can add “AHB_Cycles”
for any transaction entering the AHB Bus, and it will delay processing
for this
amount of Time. The user must add this field and specify the
value before
entering the AHB Bus block. If the field does not, exist, no
additional
Wait States are added. This process can also be used to add
additional
Wait States for a
Pipelined
Address Operation
Address Pipelining provides increased throughput to the AHB Bus by hiding the Address phase of the next transaction during the Data phase of the previous transaction. When there are multiple transaction to be sent out, the first transaction alone sends a Address Out. The first transaction is determined when the transaction starts from an empty request queue. When a new request is selected and there is an outstanding request, the transaction skips the address cycle and goes directly to sending the request.
Determining
the Availability of a
Slave Device
AHB Bus automatically identifies the state of the DRAM and Cache block and generates a Retry sequence if they are busy. Busy for these blocks is when the input Queue is full. For all other devices and for custom user devices, status of the destination can be referenced in a memory related to the final destination. If the value in the A_Destination field is “MyDevice”, then the status is checked at “MyDevice_Status”. "MyDevice_Status" must be a global memory. If true, the transaction would continue, else a retry would begin to execute. If no global memory is found matching this name, the AHB Bus assumes the status to be true.
When a
transfer occurs the slave can
decide to issue a
The
basic stages of a
Retry Operation
The RETRY response works only for Read operations. It currently does not support Write operations. It provides a mechanism for slaves to release the bus when they are unable to supply data for a transfer immediately. The mechanism allows the transfer to finish on the bus and therefore allow a higher-priority master to get access to the bus.
If the Cache or DRAM is used, the block uses the getBlockStatus RegEx to determine the status. For any other Destination, the Bus will check the global memory called Destination Name + "_Status". If the value of the RegEx or this Global Memory is true, the normal transfer occurs. If the value is false, then the Bus will generate a Retry. When a Retry occurs, the arbiter will continue to use the normal priority scheme and therefore only masters having a higher priority will gain access to the bus.
Adding
Additional Masters and Slaves
Additional Master and Slave ports can be constructed by doing the following:
Note:
AHB does not support “Custom” arbitration-mode. A error will be reported if the Custom is selected for the AHB Block.
A Write transaction proceeds as follows.

Figure 1. Timing Diagram – Write Transaction
Data
Transfer – Write Transaction:
{A_Bytes, A_Command}
Address/Control
Signal:
First
fragment: {4,
Write} // sends address, 4 bytes (Bus Width), but A_Bytes will contain the original request size
-- corresponds to Bus Control (BC) trace in red.
Data Transfer:
Write
transfer: {64,
Write} // sends words, 64 bytes, output is sent
at the 1st word transfer and the remaining bytes are delayed internally.
The following table shows an example of a Write activity:
|
List of Fields |
Input from Master to Bus |
Output to Slave (End of all bursts) |
|
A_Bytes |
Request Data Size |
Value unchanged |
|
A_Destination |
Final Destination |
No Change |
|
A_Source |
Original Source |
No Change |
|
A_Interrupt (Opt.) |
FALSE |
No Change |
|
A_Prefetch (Opt.) |
FALSE |
No Change |
|
A_Status |
Used internally by Linear Bus. Set to Slave port name. |
Set to Slave port name + Append "_" |
|
A_Hop |
Slave side port name |
Next Bus, else Destination if direct connect |
|
A_Command |
Write |
No Change |
Table 1. Write Activity
The following table shows an example of a Write Response:
|
List of Fields |
Input from Slave |
Output to Master |
|
A_Bytes |
Request Data Size |
Value unchanged |
|
A_Destination |
Final Destination |
No Change |
|
A_Source |
Original Source |
No Change |
|
A_Interrupt (Opt.) |
FALSE |
No Change |
|
A_Prefetch (Opt.) |
FALSE |
No Change |
|
A_Status |
This is used internally by the Linear Bus. This is set to Master port name |
Append _ to_Name |
|
A_Hop |
Don’t Care |
Next Bus or Destination if direct connect |
|
A_Command |
Read. Can have any suffix |
Unchanged |
Table 2. Write Response
A Read transaction proceeds as follows.
Read Request Transaction:
Note: The Read transaction takes one cycles to send the the packet out.The following table shows an example of a Read Request Transaction:
|
List of Fields |
Input from Master |
Output to Slave |
|
A_Bytes |
Request Data Size |
Value unchanged |
|
A_Destination |
Final Destination |
No Change |
|
A_Source |
Original Source |
No Change |
|
A_Interrupt (Opt.) |
FALSE |
No Change |
|
A_Prefetch (Opt.) |
FALSE |
No Change |
|
A_Status |
This is used internally to set the Master port name |
Append _ to Name |
|
A_Hop |
Don’t Care |
Next Bus or Destination if direct connect |
|
A_Command |
Read. Can have any suffix |
Unchanged |
Table 3. Read Request Transaction
Read Transaction- Response:
Note: The Read response takes two cycles to send the the packet out, 1 cycle for address/control and another cycle for 1st word transfer. The remaining values are delayed internally.
The following table shows an example of a Read Transaction- Response:
|
List of Fields |
Input from Slave |
Output to Master (End of all Bursts) |
|
A_Bytes |
Request Data Size |
Value unchanged |
|
A_Destination |
A_Source (Names flipped from Request. Can be an alternate destination also) |
No Change |
|
A_Source |
A_Destination (Names flipped Request.) |
No Change |
|
A_Interrupt (Opt.) |
FALSE |
No Change |
|
A_Prefetch (Opt.) |
FALSE |
No Change |
|
A_Status |
Used internally. Set to Slave port name |
Set to Master port name + Append "_" |
|
A_Hop |
Slave side port name |
Next Bus or Destination if direct connect |
|
A_Command |
Write |
No Change |
Table 4. Read Transaction- Response

Figure 2: Timing Diagram – Read Transaction
Data Transfer – Read Transaction
{A_Bytes, A_Command}
Address/Control
Signal:
First
fragment: {64,
Read}
//sends address, 4 bytes(Bus Width), but the A_Bytes maintain the original request size
-- corresponds to Bus Control (BC) trace in red.
Data
Transfer:
The slave DRAM reads and returns the read data, setting the A_Command as ‘Write’.
The
64 bytes to be transferred through
the bus are sent from the Slave device.
Write
transfer: {64,
Write} //sends words, 64 bytes, output is issued
after the 1st word transfer, remaining bytes are delayed internally.
-- corresponds to Bus Data (BD) trace in blue.
The
Read response returning to the Master
is sent when all of the data has been received. On receiving a Processor_DS from the Bus
Master, the
Following are the list of demo models available in the tool.
VS_AR/doc/Training_Materials/Architecture/Bus/AHB_AXI:
1.
AHB_Buffered_Non_Buffered.xml
2. AHB
_MultiMaster_Fabric.xml
3.
All_AHB_Bus.xml
4.
AMBA_AHB_Bus_Model.xml
5.
AMBA_AHB_with_APB_Bus_Model.xml
6.
linear_Bus_AHB_Split2_Read_Test.xml
7.
Linear_Bus_AHB_Split2_Read_Write_Test.xml
8.
linear_Bus_AHB_Split2_Write_Test.xml
9.
AHB_AXI_Bus.xml
10.
AHB_APB_Bus.xml
11.
Smartfusion_test2.xml
12.
Three_level_Bus_Model.xml
Before an AMBA AHB transfer can commence the bus master must be granted access to the bus. This process is started by the master asserting a request signal to the arbiter. Then the arbiter indicates when the master will be granted use of the bus. A granted bus master starts an AMBA AHB transfer by driving the address and control signals. These signals provide information on the address, direction and width of the transfer, as well as an indication if the transfer forms part of a burst. A write data bus is used to move data from the master to a slave, while a read data bus is used to move data from a slave to the master. Every transfer consists of:
The address cannot be extended and therefore all slaves must sample the address during this time. The data, however, can be extended using the HREADY signal. When LOW this signal causes wait states to be inserted into the transfer and allows extra time for the slave to provide or sample data. During a transfer the slave shows the status using the response signals, HRESP[1:0]:
OKAY
The OKAY response is used to indicate that the transfer is progressing normally.
In the VisualSim model, normal progress does not require a response.
HREADY
HREADY goes HIGH this shows the transfer has completed successfully.
In the VisualSim model this corresponds to the data structure returned, no interpretation is necessary.
ERROR
The ERROR response indicates that a transfer error has occurred and the transfer has been unsuccessful.
In the VisualSim model, errors do not occur due to noise or hardware failure.
RETRY
and
Both
the RETRY and
In normal operation a master is allowed to complete all the transfers in a particular burst before the arbiter grants another master access to the bus. However, in order to avoid excessive arbitration latencies it is possible for the arbiter to break up a burst and in such cases the master must re-arbitrate for the bus in order to complete the remaining transfers in the burst.
To Run the Model, the Model Parameters and the transaction data structure flowing into the respective channel of the AHB Bus Block (ex: Processor_DS) etc need to be setup.
|
Parameter Name |
Value (Data Type) |
Explanation |
|
Architecture_Name |
“Architecture_1”(String) |
It
refers the Architecture_Setup name. Please keep both the names as same.
It can be linked to top level parameter. Giving different names other
than Architecture_Setup block's name will throw an error. |
|
Bus_Name |
“AHB” (String) |
Unique name for this Bus. This name must be different from all architecture blocks, schedulers, smart_resources and global model memories. |
|
Enable_Plots |
false (check box) |
This parameter is used for enabling the activity plotter for AHB. It will give the Timing diagram for each ports based on the control/Address and Data transaction within the bus |
|
FIFO_Buffers |
8(int) |
It defines the input Buffer size of the bus. It can be linked to top level parameter. If the number of input request coming to the bus is higher than FIFO Buffer length, then some of the packets can be lost. |
Key parameters for configuration
|
||
|
Bus_Speed_MHz |
100.0 (Double) |
Speed of the bus is specified in terms of Mega Hertz. This
value is used for defining the clock cycle and internal timings. It can be
linked to top level parameter. |
|
Bus_Width_Bytes |
8 (Int) |
This parameter defines the width of the bus. The Bus can transfer only this much bytes in a single clock cycle. |
|
Burst_Size_Bytes |
16 (Int) |
It defines the Maximum length of Bytes that the bus can send as burst transfer. Burst size should be greater than Bus_Width_Bytes. This parameter can be linked to top level parameter. If A_Bytes that is equal to or smaller than this number will be sent as a single burst. Any A_Bytes that is greater than this number will become two or more bursts. |
|
Round_Robin_Port_Array |
{Bus_Name+"_Port_1", |
This parameter can be used only when the bus operates on Round Robin mode. It determines the Round robin order for the ports. |
|
Device_Attached_to_Slave_by_Port |
{"Device_1"}, {"Device_2"}, {"Device_3"}, {"Device_4"}, {"Device_5"}, {"Device_6"}, {"Device_7"}, {"Device_8"}} (Array of Strings) |
This parameter can be used for routing purpose when the hello messages are disabled. It will help the bus to transfer input data to a specific destination port. |
|
Mode_Arbiter |
FCFS (Pull-down) Available options: FCFS, RR, CUSTOM |
This parameter defines mode of AHB Bus. FCFS defines
the First Come First Serve mode and RR defines Round Robin mode of operation CUSTOM is
the option used for implementing custom Scheduling algorithm for AHB
Master and Slave ports. It can be achieved by using custom_out,
custom_in ports in AHB. |
Table 5: List of AHB Bus Block Parameters
|
Data Structure Field |
Value (Data Type) |
Explanation |
|
A_Bytes
(necessary) |
100 (Int) |
This is the total bytes to be transfered for this transaction. All bursts of this transaction will have this value. |
|
A_Bytes_Remaining |
96 (Int) |
The number of bytes remaining after the current transaction. |
|
A_Bytes_Sent |
4 (Int) |
The number of bytes in this transaction. |
|
A_Command (necessary) |
"Read" or "Write" or "Read_Split" (String) |
This determines the operation. |
|
A_First_Word |
true or false (Boolean) |
Specifies whether this is the first word of the transfer |
|
A_Priority |
2 (Int) |
This is priority of the transaction. The transactions waiting for service are reordered based on this value. |
|
A_Source (necessary) |
"Processor" |
This is unique name of the Source. When the transaction returns from the Destination, the Source and Destination names are flipped. So, the Source becomes the Destination and Destination becomes Source. |
|
A_Destination (necessary) |
“DRAM” (String) |
Final Destination |
|
A_Hop |
“DRAM” (String) |
Set to match A_Destination |
|
A_Task_Flag |
false (Boolean) |
The default is false, which means that the Master does not require an acknowledge for a Write. If set to true, the VisualSim standard blocks will send a acknowledgment back when all the data has been written to the Slave. The DMA block uses this field to get a return from the Cache or DRAM block. |
Table 6: List of Data Structure Fields used in the AHB Bus
|
Port Name |
Type |
Explanation |
|
port1, port2, port3, port4, port5, port6, port7, port8 |
Multiport or input/output. Connection must be made in order- first input to this port and then output away from this port. |
Each port is for a Master or Slave. Transaction Data Structure of type Processor_DS. |
Table 7: List of AHB Bus Ports
|
Description |
A_Command |
A_Bytes |
A_Bytes_Remaining (optional) |
A_Bytes_Sent (optional) |
|
100 Byte Read at Slave. Bus Width = 4 |
Read |
100 |
96 |
4 |
|
100 Byte Read Return at Master |
Write |
100 |
0 |
100 |
|
100 Byte Write at Slave |
Write |
100 |
0 |
100 |
Table 8: Transation Field Values
The following image shows the right way to connect the AHB in the Architecture. Source like Processor and DMA can be connected directly to the AHB port, but if the Master device is designed with simple library block(as logic) then user has to include Device Interface block to provide the interface with master. Similarly for Slave. Slave like RAM, Integrated cache and display can be connected directly to the slave port.
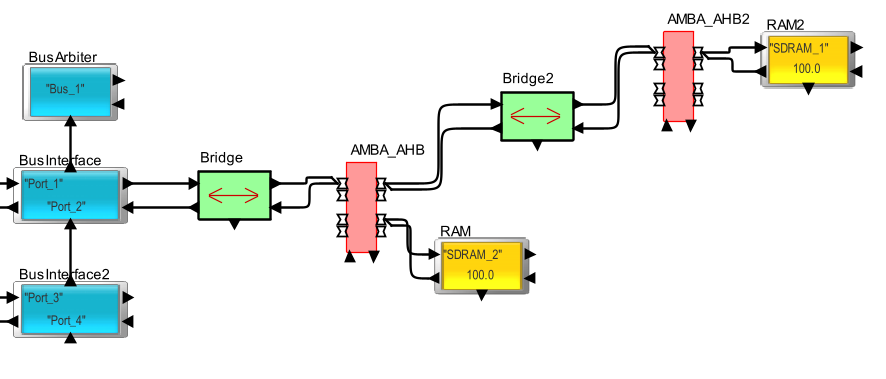
The
Bridge block plays important role in connecting the different buses in
the architecture. Two buses can not be connected directly, user has to
use Bridge block.
The Key statistics for the AHB bus are:
1. Delay
The maximum and minimum delay that is handled by the AHB during the simulation.
2. IO operations per second
The total number of input and output operations happened during the simulation
3. Input Buffer Occupancy
Whenever the bus is occupied the input requests will be waiting in the buffer.
4. Preempt Buffer Occupancy
The request that are preempted by the higher priority request are
5. Throughput
Throughput of the bus in terms of Mega bytes per second are observed.
6. Utilization
Percentage of utilization for this bus is observed for the entire simulation time.
These are analyzed as max, min, mean and standard deviation of it.
The following image shows the statistics that can be observed and analyzed in AHB bus.

Analysis:
AHB Delay:
Bus Width bytes will determine the number of cycles
of delay other than control/address cycle in the internal process. User
can check whether the uniform transaction is happening or not based on
the model construction.
IO operations per second:
Number of IO operations in the consecutive blocks
should be same. if there are mismatching amount of transactions is
displayed then the block is not receiving the exact transactions from
the neighboring blocks.
Input Buffer Occupancy in words:
The buffer occupancy(number of words based on bus
width) of the bus during the simulation are observed, it will help the
user to determine the buffer length of the design during the actual
design integration.
Preempt Buffer Occupancy:
This will help the user to analyze the number of
request that is buffered in the queue because of the preemption of
higher priority request.
Throughput:
This will help the user to check whether the
designed speed and bytes are working properly or not. Throughput can be
compared with the neighbor blocks to check whether the requests are
processed by the bus during the simulation or not.
If the throughput is not same as the neighbor blocks
then check the connectivity or the previous block to see the data is
routed properly. Some ports may not be connected and the data are not
getting processed.
Utilization:
This will help the user to see how good the
resources are utilized in the design. Based on the percentage of
utilization user can improve the system configuration to get efficient
outcomes.
There are two methods for enabling and analysing the plots in the AHB bus.
1. Adding Timing daiagram to the model (Hardware Setup - >
TimingDiagram) and modify the bus name in the configuration window.
This will shows the overall transaction in the bus along with the other
blocks in the model.

2. Enabling the "Enable_plot" parameter in AHB configuration window.
This will show the data transaction at each port.

1.
Explanation : if
(port_token.A_Command == "Write") false, expression plus 4, else plus
1., Check argument types, argument values, field names, and variables.
Exception :
VisualSim.kernel.util.IllegalActionException: No method found matching
{A_Bytes = int, A_Destination = string, A_Hop = string, A_Instruction =
arrayType(string), A_Source = string, BLOCK = string, DELTA = double, DS_NAME =
string, ID = int, INDEX = int, TIME = double}.A_Command()
2.
VisualSim.kernel.util.IllegalActionException:
.AHB_Testing.AMBA_AHB.AMBA_Port @ 0.0 ps -->
Created with the Personal Edition of HelpNDoc: Free Kindle producer