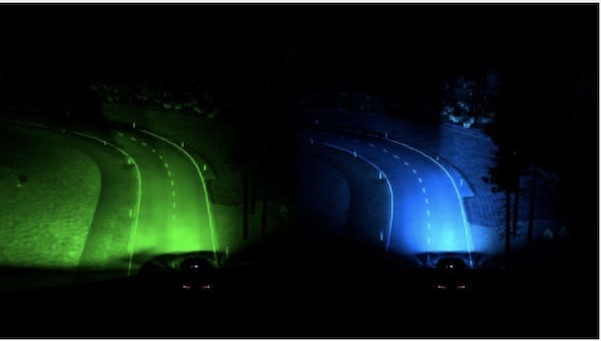
Prototype headlight system not currently available for specification. The predictive system directs beams into upcoming corners even before drivers may have seen them.
Driving at night, especially on unfamiliar roads, can be stressful, with many people choosing to avoid the experience altogether. Manufacturers though are increasingly working on headlight technology to improve road illumination and make driving in the dark easier. Ford, for one, has earlier used road signs and lane markings as cues to adjust headlight beams to better illuminate the road ahead, especially around junctions.
Now, engineers from Ford’s research division are testing technology that uses real-time location data to effectively show the car the way to go. The predictive smart headlight system directs beams into upcoming corners even before drivers may have seen them, illuminating hazards and other road users more quickly and effectively. The prototype advanced lighting system uses GPS location data, advanced technologies and highly accurate street geometry information to accurately identify turns in the road ahead.
An algorithm calculates the trajectory and speed of the vehicle to proactively adjust the direction of its headlights, providing optimal light coverage of bends, junctions – and even hazards lurking around the corner. If the vehicle encounters a stretch of road where location data is not available, the system will work alongside camera and steering‑based dynamic headlight bending technologies to continue to light the road until the location data improves.
The first corner-seeking headlights appeared in the 1936, 1937 Cord, which were mechanically-based on front wheels turning. GPS-based headlights are an attempt to continue this automotive design feature; where GPS has some disadvantages:
(1) GPS not 100% reliable; satellite failure, or disrupted?
(2) Maps may not reflect remote rural location updates?
(3) No GPS in tunnel, garage, or surrounded by trees?
(3) European map data may not contain updates?
The original mechanical concept seems like a better solution, except driven by wheel movement; may resolve GPS signal issues? Another advantage here is that the wheel already has position, velocity, acceleration data to drive a potential side LED illumination? If autonomous or driver driven wheel position, no GPS; just wheel electronic data drives an FPGA chip, and VisualSim can model FPGA IP. Advanced technology, such as GPS, have a downside often ignored by developers; whereas the original feature provides the best clue? The Ford design does accommodate a missing GPS reference by more complex processing of camera, wheel?
Web Reference: https://www.msn.com/en-in/autos/news/fords-new-prototype-headlight-tech-uses-gps-for-more-effective-road-lighting/ar-BB1fYKSN